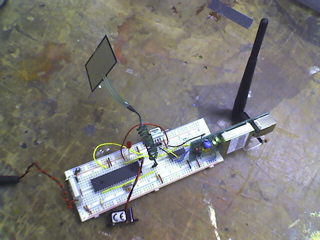
We’ve configured the WiPort for basic communication in both directions. Our code takes an analog value and sends it out. At the same time, it waits for a control character (here set to “Z” for ease of use in debugging via telnet) and then checks to see if it’s followed by a data byte (specifically the letter “A”, again for debugging ease). If it gets the proper sequence of “ZA” then it turns on a piezo buzzer.
We have 12 1.5″ force sensing resistors on order, and will hook these up to the circuit when they arrive next week. In addition, we are going to install a vibrator motor and audio feedback inside each cube, so that game actions will create local feedback, and FSR switch state will be obvious to the user.
At this point I’d like to learn a lot more about serial data communications so that I can navigate my way thought the bewildering level of alphabet soup, and configure connections to reliably transfer data.